
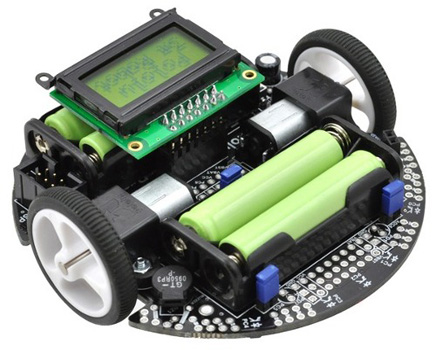
Este robot se programa en C/C++ y aunque ahora mismo no hace mucha cosa puede realizar varias tareas: desde tocar la canción del SuperMario a resolver un laberinto. Todo depende de la maña del programador ( la mía es poca). Entrando un poco más en detalles técnicos el robot se basa en un procesador ATmega328 con 32KB de memoria flash y 2KB de RAM. Tiene 2 motores(uno para cada rueda), leds(2 azules, 1 verde y 1 rojo), un buzzer, 5 sensores infrarrojos, pantalla,etc... Es necesario un programador USB AVR ISP, que no es más que la forma de conectar el robot al ordenador para cargarle los programas que realizamos. Estos programas los haremos en una IDE llamada AVRStudio y las librerías del robot las encontramos en la propia página de pololu, www.pololu.com, junto con más robots y packs de expansión para el pololu. Con las librerías nos descargamos también programas de ejemplo y el pololu trae un tester pre-cargado que nos indica el correcto funcionamiento de todas las partes. Una vez controle un poco el funcionamiento del 3pi y las librerías pensaré en comprar un kit de expansión y ponerle, por ejemplo, una cámara y un controlador wifi para controlarlo desde el pc. Y con más experiencia y dinero el quadrocopter.xD
Vídeo demostración de un programas bastante complejo para el 3pi. (ATENCIÓN AL LED ROJO)
Esto huele a TALLER!!!!!!! (en la kutru)
ResponderEliminarPor supuesto,pero no de ortografía jeje
ResponderEliminar